Робот гексапод (шестиног)
Гость (не проверено) - вт, 12/11/2013 - 15:05
За основу механической части проекта взят робот Hexy. Электронную и программную часть планируется разработать самостоятельно.
Робот позволяет изучить основы управления сервоприводами, решение задачи обратной кинематики, а в будущем и задачи искуственного интеллекта связанные с самостоятельным поиском оптимальных алгоритмов управления конечностями и выбора пути.
Алгоритмы отработанные на этой модели планируется применить в проекте робота для выполнения строительных работ. 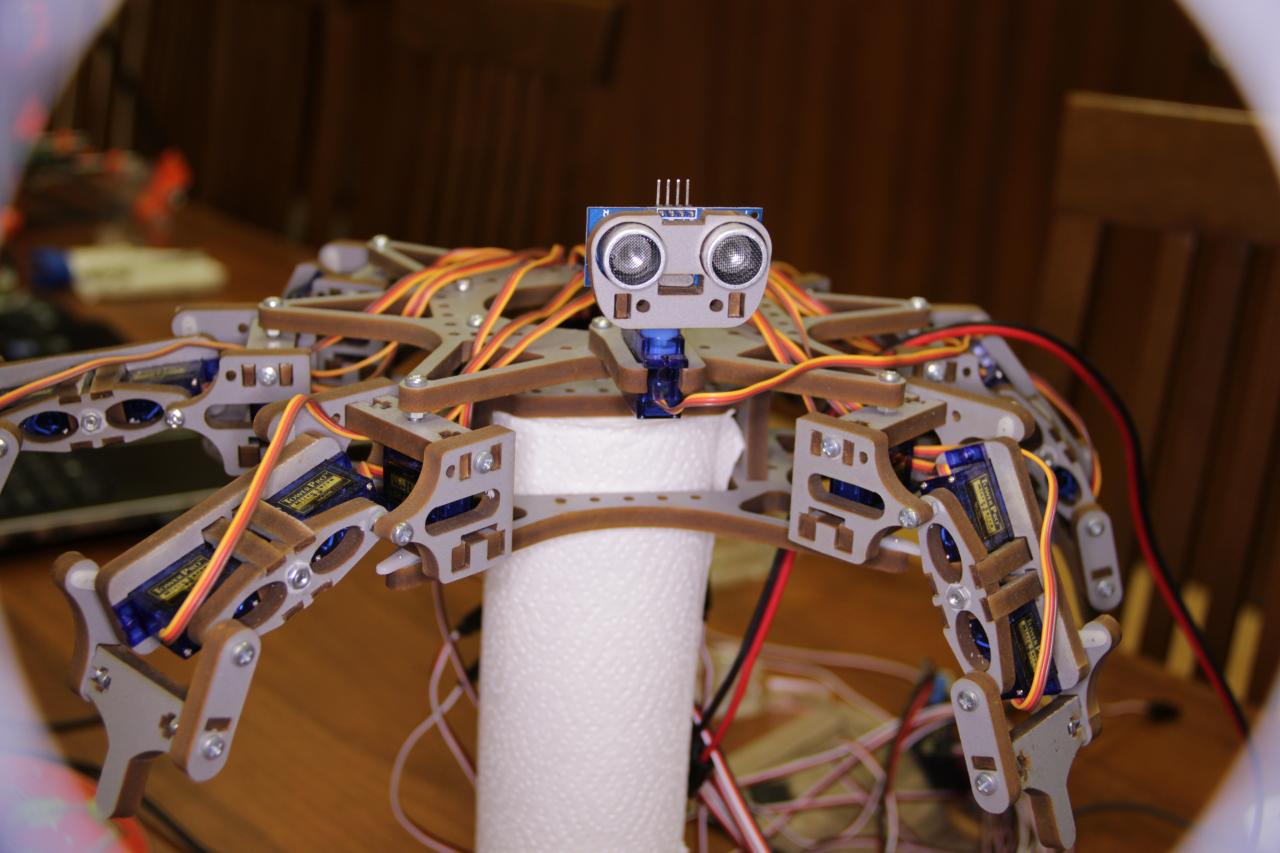
Руководитель:
